



Plateforme électricité & Véhicules
 |
|
Contacts
Alain Bouscayrol - alain.bouscayrol@univ-lille.fr - Responsable scientifique
Walter Lhomme - walter.lhomme@univ-lille.fr - Responsable technique
Contexte
L’équipe Commande du L2EP réalise des recherches sur les formalismes de modélisation et de commande des systèmes électromécaniques, à l’instar de la Représentation Énergétique Macroscopique (REM, http://emrwebsite.org). Dans ce cadre, les acteurs du thème « électricité & Véhicules » (eV) développent de nouvelles lois de commande et de gestions d’énergie pour des véhicules qui utilisent le vecteur électrique (véhicule électrique, véhicule hybride…).
Cette équipe contribue activement au réseau MEGEVH, et la plateforme "eV" est l'une des trois plateformes académiques ouvertes de ce réseau national. La plateforme eV est partagée sur deux sites. Le premier site se situe sur le campus de l'Université de Lille. Le second site se situe à l'Ecole National supérieure d'arts et métiers de Lille (ENSAM).

Objectif de la plateforme
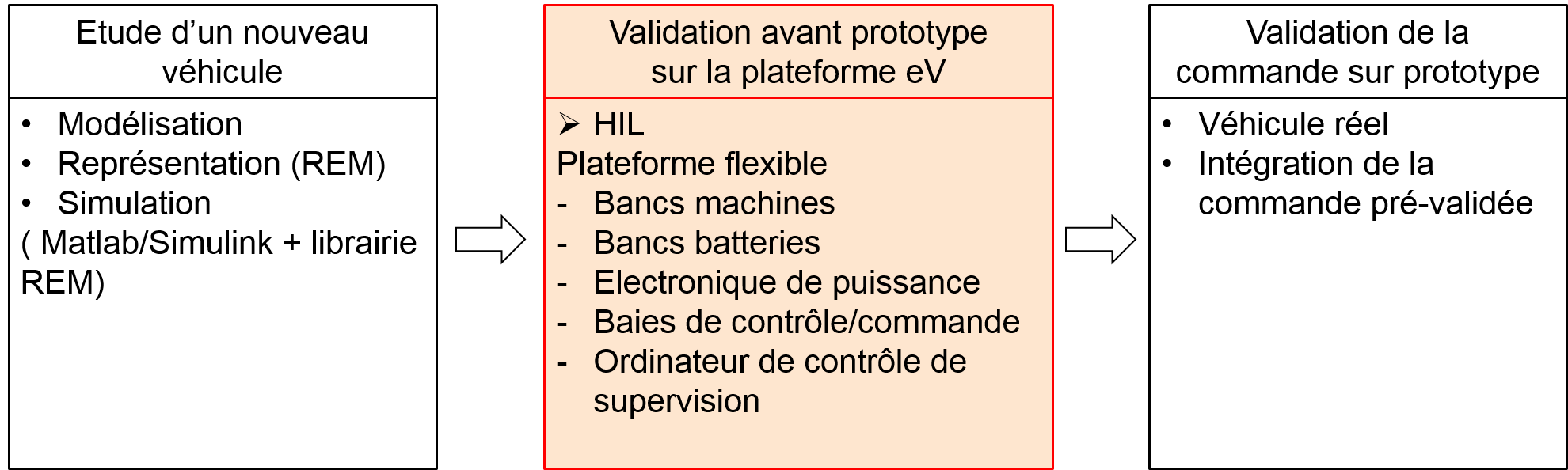
Après avoir simulé et développé la commande de nouveaux concepts de véhicules électriques ou de véhicules hybrides, des validations précises et progressives sont nécessaires avant de valider sur prototype réel.La plateforme "eV" a pour objectif de valider expérimentalement ces nouveaux concepts avant une implémentation sur véhicule réel. La plateforme est l'une des 3 plateformes expérimentales ouvertes du réseau MEGEVH. Elle a contribué à la validation expérimentale de nombreux projets de MEGEVH (Thése de Dr. Tony Letrouvé - Emulation de la Peugeot 3008).

Flexibilité
Afin de tester différents véhicules (avec différentes architectures) et différents sous-systèmes destinés au véhicule, la plateforme eV est basée sur des briques de base logicielle (bibliothèque REM, programmes de commande, programmes de supervision) et matérielle (machines électriques, électronique de puissance, système de stockage de l'énergie, transmission mécanique, véhicules électriques, cartes électroniques de contrôle-commande), qui peuvent être agencé en fonction des objectifs et des applications choisis.

Power HIL simulation (émulation de puissance)
Le principe d'émulation temps-réel (ou Hardware-In-the-Loop simulation) est au coeur de la plateforme. Il permet d'étudier les diverses commandes et de nouveaux sous-systèmes en simulant leurs interactions avec d'autres sous-systèmes.
Ainsi, après avoir réalisé et validé un programme de simulation pour le véhicule étudié, on en extrait sa commande pour contrôler, en temps réel, un système physique qui émulera ce même véhicule. Enfin, on pourra observer le comportement du véhicule et étudier ses performances avant même sa création. Bien évidemment, le choix du niveau de précision du modèle Véhicule doit être choisi en fonction des objectifs de validation des sous-systèmes.
La section suivante présente les différents équipements présents sur cette plateforme
